Problemy nieefektywności w transporcie miejskim
1.2. Model matematyczny
Niech SC(Q,K) oznacza koszty społeczne przy popycie na transport wynoszącym Q i pojemności K (wielkości te mierzone są liczbą podróży na jednostkę czasu, np. dzień). Z całkowitych kosztów można wydzielić składnik niezależny od popytu, czyli koszt stały F(K), oraz składnik kosztu zmiennego C(Q,K). Przyjmujemy założenie C(0,K) = 0, tzn. przy braku popytu ponoszone są tylko koszty stałe. Krańcowy koszt społeczny, MSC, jest pochodną kosztu społecznego po popycie na transport.

Dzięki założeniu C(0,K) = 0 mamy też:
ASC – czyli średni koszt społeczny – wynosi:

er=0">
Niech SC(Q,K) oznacza koszty społeczne przy popycie na transport wynoszącym Q i pojemności K (wielkości te mierzone są liczbą podróży na jednostkę czasu, np. dzień). Z całkowitych kosztów można wydzielić składnik niezależny od popytu, czyli koszt stały F(K), oraz składnik kosztu zmiennego C(Q,K). Przyjmujemy założenie C(0,K) = 0, tzn. przy braku popytu ponoszone są tylko koszty stałe. Krańcowy koszt społeczny, MSC, jest pochodną kosztu społecznego po popycie na transport.
Dzięki założeniu C(0,K) = 0 mamy też:
ASC – czyli średni koszt społeczny – wynosi:
natomiast średni zmienny koszt społeczny – AVSC:
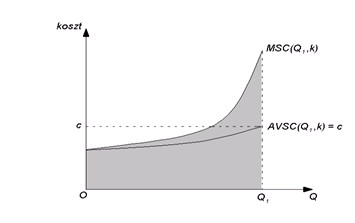 |
Rysunek 1.1. Koszty średnie, krańcowe i całkowite - Źródło: Opracowanie własne na podstawie R. J. Arnott, D. P. McMillen, A Companion to Urban Economics, Blackwell Publishing, MA: Boston 2006, s. 248. |
Wymienione zależności zobrazowane są na rysunku 1.1. Wypukły kształt krzywej kosztów krańcowych odpowiada spostrzeżeniu, iż koszty związane z dodatkowym użytkownikiem są tym większe, im większe jest zatłoczenie ruchu drogowego.
